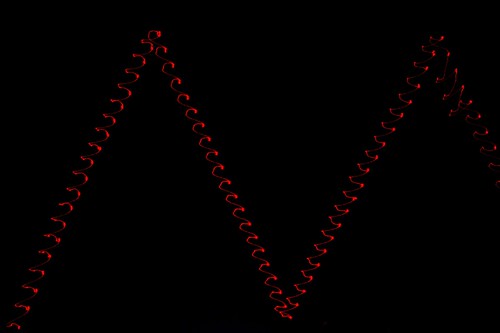
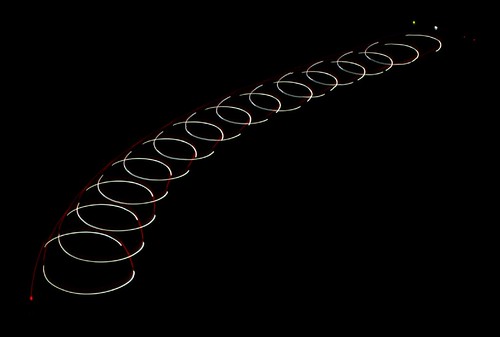
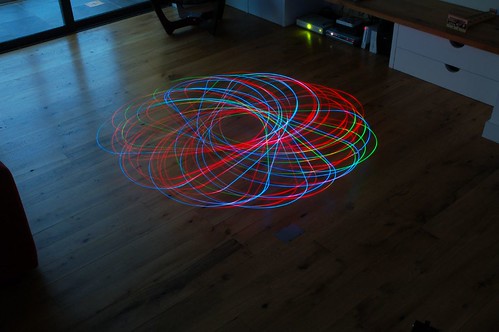
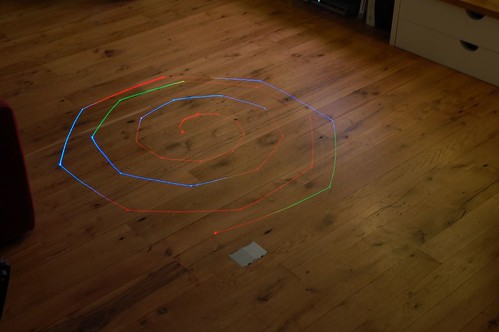
This is the latest installment of the robot stuff for making patterns in the sand. So I managed to get the motors of the robot to run at different speeds in order to do smooth curves. It makes things a bit easier in a way. Describing curves is possible by looking at it as line segments, but waaaaaay easier if you can incrementally adjust the motor speed settings. Here's the latest offering, a 760 second exposure - it's certainly a little more interesting:
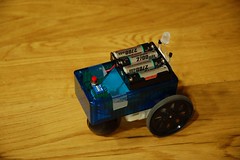
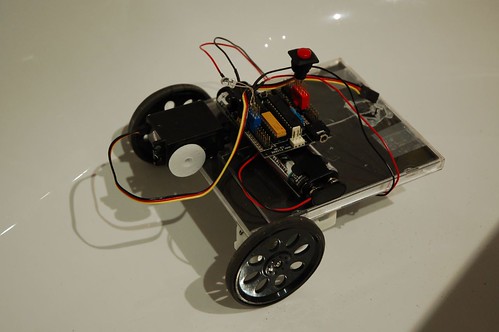
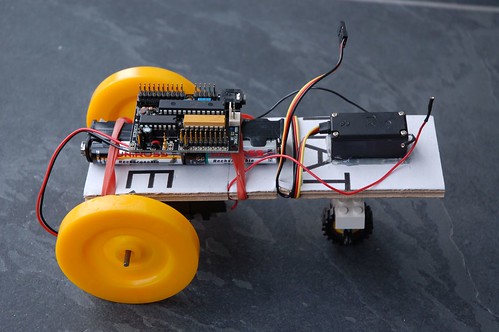
And here's the perpetrator, or as I'm calling it "The Perpetrator":
The servo will be for lowering the stick/rake/device onto the sand. Yes, even I think that it might not work quite perfectly. Perhaps the trick will be to cause as much disruption to the surface of the sand with the least mechanical effort, so as not to strain motors and waste batteries. The real knack will be in doing a pattern which will be photographable (even I don't know if that a real word, my spell checker says it's not - blaaaaaaaaaah).
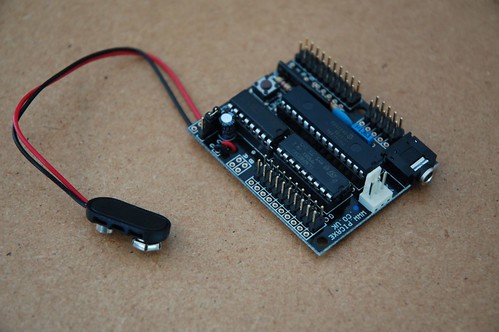
And here's the code for the PICAXE:
let w1 = 3000 'forwards length
let w2 = 4000 'pulse width
let w3 = 120 'turn period (via for...next loop)
high 0
check: let b1 = pins
if b1 = 000010 then
low 0
pause 2000
goto main
end if
goto check
main:
high 4 high 7 'forwards
pause w1
high 4
for w0 = 1 to w3 'turn
pulsout 7,w2
pause w0
next w0
low 4 low 7 'stop turning
goto main
I'm so inefficient at programming, but it gets the job done, so hey.
D'you know, I almost forgot to say that the coolest and smallest thing on this robot is the RGB LED - how else would I get multicolour light lines for 50p?